本文介绍基于单片机的寻迹机器人系统,主要应用MSP430作控制核心,直流电机、舵机、一体红外接收头等相结合组成整个系统。此系统软硬件设计简单,易于开发,严格控制各元件采购成本,所以价格低廉,安全可靠,操作方便。
1 系统原理
1.1 自动寻迹模块的系统原理
本设计中自动寻迹模块主要由单片机及其外同电路、红外寻迹电路、直流电机控制电路等组成。正常工作时,单片机循环检测红外寻迹电路输出信号,据此产生直流电机控制信号,当系统检测到工作方式发生改变时,系统进入相应方式。其原理框图如图1、图2所示。
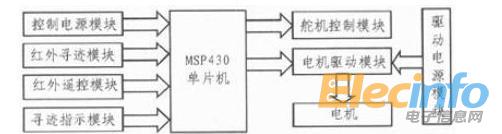
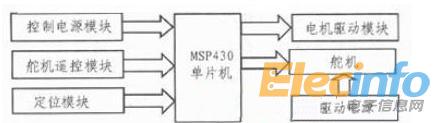
图2 自动寻迹模块原理框图
1.2 六自由度机械手模块的系统原理
系统的设计采用模块化的方法,将机械于划分为基座、手臂、手腕、手部4部分。控制器以MSP430单片机为主控制器,具体控制部分框图见图3。

图3 六自由度模块的原理框图



