1 引言
风速及风向的测量是气象观测中重要的一环。风速风向可以基于流体力学原理、热学原理、声学原理和仿生学原理来测量。热式测风仪基于风对热体的对流作用来测量风速和风向,其存在一个精密的热源,通过把两对相对的热源与热电偶正交放置测量风向。超声测风仪可以同时进行超声波的发射和接收,基于多普勒效应测量风速,用三个或者四个探头根据三角关系测量风向信息。基于MEMS技术传感器有体积小、重量轻及成本低的特点,基于MEMS技术的风速和风向测量传感器受到了研究者的重视。
本文介绍了基于MEMS的固态风速风向传感器的设计原理及软件模拟结果,并依据理论与模拟结果设计了工艺流程,对设计的悬梁式测风传感器进行了测量。
2 传感器原理
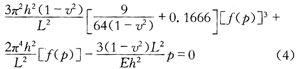
2.1 硅薄膜式传感器原理
硅薄膜式测风传感器的设计示意图如图1所示。薄膜式风速风向传感器主要是利用风吹薄膜对薄膜产生风压,风压导致薄膜形变,薄膜上的应变电阻就会感应到薄膜的形变。通过测量应变电阻的变化即可解算出风速大小。设定测量时风正面吹向薄膜如图2所示。
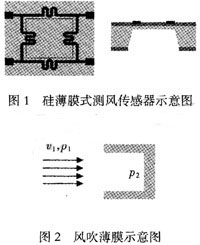
图2中:υ1表示风的平均流速;p1表示风流的压力;p2表示薄膜所受的压力,应用流体力学中理想伯努力方程如式(1)。其中p为空气的密度,化简后可以得出薄膜承受绝对压强p的变化与风速的关系如式(2),即
![]()
设W(x,y)是薄膜弯曲的挠度函数。由式(2)可以得出0~30 m/s风的压强为0~580.5 Pa。在此范围之内薄膜的挠度远小于薄膜的厚度,故挠度可以近似计算为
W(x,y)=hf(p)cos2(πx/L)cos2(πy/L)(3)
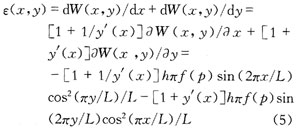
其中坐标系是平面直角坐标系,其原点是正方形薄膜中心,坐标轴平行于薄膜的边。其中h和L分别是薄膜的厚度和边长。f(p)是一个关于薄膜绝对压强的函数。f(p)由方程(4)决定,即
p是作用在膜上的绝对压强;E和υ分别为薄膜材料的杨氏模量和泊松比。材料的形变定义为单位长度材料的变化。设ε(x,y)是薄膜的应变函数,可以用式(5)来计算,则
薄膜上的应变电阻的形变与其所在的位置有关。定义h′为应变电阻的高度;W为应变电阻的宽度;x0,y0是应变电阻的起始位置,则可以得到应变电阻的总的形变,如式(6)。应变电阻的电阻归一化变化表达式为

由式(2)可知p与速度υ的平方成正比,故可以得出电阻阻值的相对变化与风速是二次关系。风速信号解调出来后,通过正交封装来解调风向信号。南北方向的传感器测出南北方向的速度υns,东西方向的传感器测出东西方向的速度υwe,通过正交关系式(9)和式(10)最终得出速度和风向值,即
![]()



