近年来我国对于航空领域的电子技术研究日渐兴盛,对于倾转旋翼机的研究尤为突出。与传统飞机相比,倾转旋翼机以其可实现垂直起降和水平飞行两种模式的切换外,同时还具有载重量大等优点。本文就将采用ADuC7060单片机为控制芯片,针对倾转旋翼机控制的无刷直流电机驱动器进行讲解。
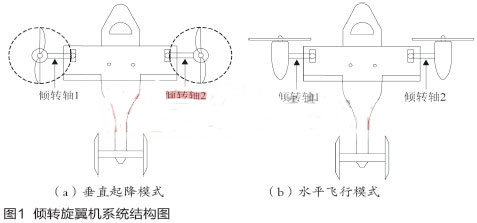
说到倾转旋翼机,首先要了解其结构(如下图所示)。通常倾转旋翼机分为垂直起降模式和水平飞行模式。系统采用MEMS陀螺仪和加速度计作为传感器,为控制器提供位置姿态信号,在负反馈机制作用下,驱动执行器进行姿态调节。以垂直起降模式为例,当两倾转轴同向转动时,就可以实现俯仰姿态的调节;当两倾转轴反向转动时,就会为机体提供一个扭矩,实现偏航姿态的调节;而当左右两个电机转速差动时,就实现滚转姿态的调节。可见,无刷直流电机的平稳调速对旋翼机系统至关重要。
目前无位置传感器无刷直流电机驱动策略主要以反电势法为主,也就是说不需要借助位置传感器,仅通过检测反电势信号就可以判断转子位置,具有结构简单、可靠性高等优点(如下图所示),为A相绕组的反电势在一个电周期内的波形,其中横轴代表当前运行时刻的电角度,纵轴代表A相绕组产生的反电势Ea。从图中可以看出,当检测到反电势信号过零点后,再延迟30°电角度即是换相点。对于三相绕组电机,每隔60°电角度就会产生一个反电势过零点,过零点信号被ADuC7060微控制器检测并处理后,就可以产生相应的驱动信号驱动电机连续运转。
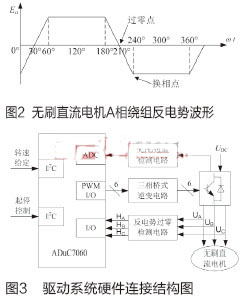
本文采用电压为12 V的模型动力电池供电。硬件连接框图如上图所示,ADuC7060微控制器通过I2C接口接收来自主控制器发送的控制信号,根据转速要求改变PWM占空比,并实时检测反电势过零信号,进而通过桥式逆变电路驱动电机调速。为了保证运行安全,系统中还利用采样电阻设计了欠压/过流检测电路,以便在电池欠压和电机堵转过流时为系统提供保护。下面将对主要单元电路分别进行介绍。在本系统中,逆变电路为三相桥式结构,采用上桥臂单边PWM控制。如图4所示,图中V1~V6为功率MOSFET,上桥臂选用型号为IRFR5305的P沟道功率MOSFET,当PWM输出高电平时导通;下桥臂选用型号为IRFR1205的N沟道功率MOSFET,当I/O端口输出低电平时导通。在每个功率MOSFET的前端都放置了一个三极管,目的是提高微控制器端口的驱动能力,保证MOSFET的可靠开关。在一个电周期内,控制导通相序为AB→AC→BC→BA→CA→CB,即可使电机连续旋转。



