为何感知系统只有摄像头?
在初始阶段,车队的感知系统只配备了摄像头。在360°全景系统中,每辆车配备了十二个摄像头,其中,八个摄像头探测远距离环境,另外四个用于泊车。这个阶段的目标是想证明,仅依据摄像头获取的信息,就可以形成端到端的自动驾驶方案。该方案中,环境感知系统通过俯视图来呈现行驶汽车周围的环境状态,能够识别车辆和行人、道路标志和交通信号灯的含义,能够实时创建高清地图并帮助汽车做精确到厘米级的定位,能够进行道路规划(即驾驶策略)和车辆控制。

英特尔和Mobileye自动驾驶汽车上分立式安装了十二个摄像头,能提供360视角并进行远距离环视和停车。
初始阶段是为了实现感知系统的“真正冗余”。“真正冗余”是指,感知系统包含多个独立工作的子系统,每个子系统都可以独立支持自动驾驶。而之前的感知系统,则是将不同来源的原始传感器数据整合在一起,实际上,只有一个传感系统。“真正冗余”有两个主要优势:首先,感知系统验证所需的数据量大大降低(十亿小时的平方根 VS 十亿小时),如图 A 所示;其次,如果其中一个子系统故障,车辆可以继续安全行驶。如果采用数据整合的传感系统,则需立即停车。数据整合传感系统就好比一串圣诞树彩灯,如果一个灯泡坏了,那么,整串彩灯也就坏了。
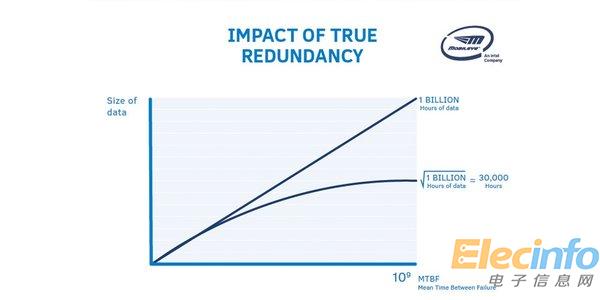
“真正冗余”的作用 (注:此图从“平均无故障时间”(MTBF)测试角度对上述两种系统进行比较。这里的故障是指,任何一个可能导致死亡的传感器故障。Mobileye的目标,是把MTBF提高到十亿小时,比手动驾驶汽车的安全标准高一千倍。单传感器系统需要收集约十亿小时的数据来测试MTBF,而“真正冗余”感知系统则只需收集大约三万小时的数据(十亿小时开平方)。此外,“真正冗余”感知系统可以在实验室进行MTBF测试,无需到实际驾驶环境中收集数据。)
未来几周,我们会在系统开发的第二阶段,加入雷达/激光雷达传感设备,通过不同的传感模块之间的协同作用,来提升驾驶的“舒适性”。
当前及未来的计算平台硬件
自动驾驶车队的端到端计算系统安装了四颗 Mobileye EyeQ®4 芯片。该芯片功率为六瓦,在八位深度网络上,提供每秒2.5万亿次运算(TOP/s)的计算能力。EyeQ4是 Mobileye 最新推出的系统级芯片,于2018年生产。Mobileye 计划,今年再推出四款芯片,2019年推出十二款芯片。根据公司规划,EyeQ®5 支持全自动驾驶,在今年晚些时候,就可以推出工程样品。EyeQ5 提供二十四万亿次运算的能力,比 EyeQ4 强约十倍。我们计划,为一辆 L4/L5阶段的全自动驾驶汽车,配备三颗 EyeQ5芯片。因此,2019年初推出的新一代 EyeQ5的计算能力,将是目前 EyeQ4 芯片的十倍。
英特尔和 Mobileye 采用的方法不同于业界常用的方法。业界在研发中往往超额订购计算需求,比如,要求“在产品开发中给我无限的计算能力”,然后,再尝试进行成本和功耗优化。而我们则使用更有效的策略,来减少计算需求,从而聚焦于开发最有效的算法 -- 用于状态感知、驾驶策略制定和车辆控制。
前路漫漫,但我依然为 Mobileye 和英特尔的开发团队感到无比的自豪,感谢他们的努力工作和取得的重大突破。我们的目标是:在客户的支持下,这套系统在2021年进入批量生产并应用于L4/L5阶段自动驾驶汽车。