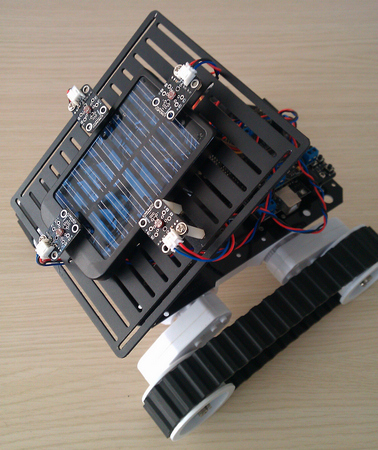
现代社会越来越讲究资源的节约,随着煤、石油、天然气这些不可再生能源越来越稀缺,在不久的将来,绿色能源势必会成为主流能源。所谓绿色能源,也就是可再生能源,包括风能、太阳能、水能、生物能等。其中太阳能更是越来越得到人们的青睐,在人们的生活工作中起着广泛的作用,太阳能发电就是其中最普遍的一种应用。一般的太阳能收集装置都是固定在一个方向的,不能充分采集太阳能。笔者制作了一款名为“向日葵”的太阳能收集装置,它的最大特点就是装有转动装置,4个在太阳能板周围的光传感器随时检测周围环境光的亮度,经过代码处理,加上底下舵机的旋转,就能让太阳电池能板始终对着光最强的方向。放到太阳光下的效果,就是它始终会对着太阳的方向,这样就能保证最大限度地收集太阳能。
笔者的太阳能收集装置基于Arduino制作,所用的元件都与Arduino兼容。Arduino是一个开放源代码的硬件项目,最大的优势就是具有良好的开放性和扩展性。用户在它的官网上可以随时免费下载电路图、源码和软件开发环境等,依据官方提供的PCB和SCH电路图,简化Arduino模组,来完成独立运作的微处理控制;也可以很方便地与传感器、各式各样的电子元件(红外线、超音波、热敏电阻、光敏电阻、伺服电机等)连接。Arduino所用的编程语言类似C语言,但是结构更简单,更简洁易懂,对于机器人爱好者和电子知识尚欠缺的人群而言更容易上手。

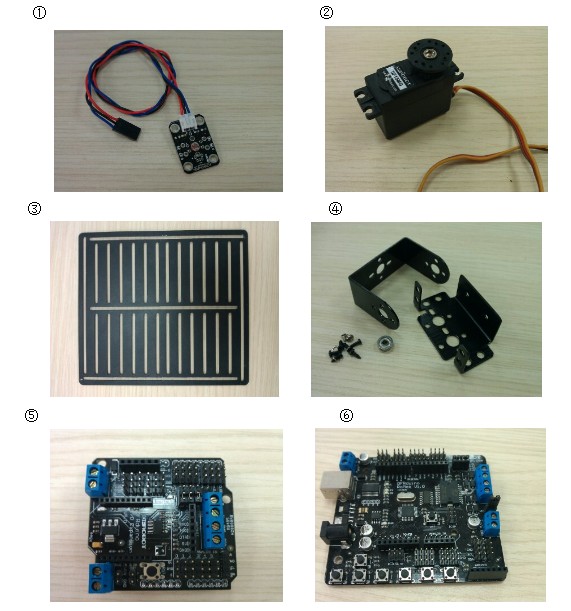
笔者使用DFRobot 的Romeo控制器对小车平台做直接的电机控制。首先准备好制作“向日葵”的材料,这里用到了4个光线传感器、2个舵机及固定支架、1块扩展板、1块控制板、1块多功能固定板、1部Rover 5小车(将向日葵固定在小车上,方便全方位监测)、1块太阳能板,最后别忘了电源(7~12V)。详细信息如表1所示。
路虎(Rover)5履带小车
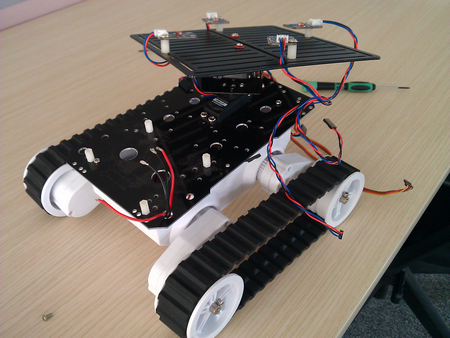
路虎5履带小车与一般履带小车相比不同的地方是,可以根据路面情况的需要,调节前后轮的高度。为了提高履带小车的越野性能及美观度,笔者将前后轮支架调节到了与地面形成15°左右夹角的位置。
由于Romeo的工作电压在7~12v,并且履带小车的工作电压与Romeo控制器相近,所以使用了6节1.2V的充电电池作为电机和Romeo控制器的电源,当然,选用7.4V的锂电池也会是一种比较合适的选择。
制作过程
准备好了上述材料就可以将这些元器件拼起来了,制作步骤如下。
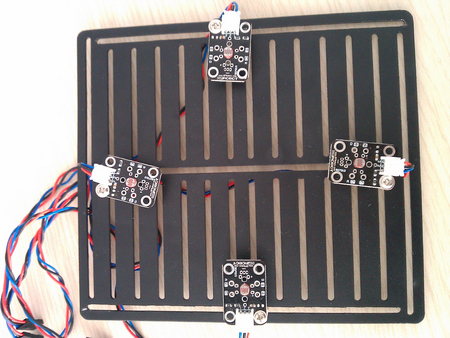
1.将4个环境光线传感器呈“十”字形固定在多功能固定板的4个边上,这样做的目的是方便检测四周光线,尤其是在制作追光机器人时更体现了它的优势。
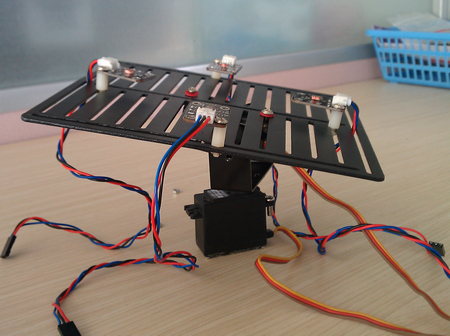
2.将2个舵机固定在一起。这2个舵机分别控制横向和纵向的旋转,这里所用的舵机的旋转角度是从0°到180°的。考虑到横向舵机在做太阳能收集器时不需要180°旋转,所以只要设定一定的偏角即可。而纵向舵机因为要寻找光源,所以需要360°旋转,为此我将它安装在小车上,通过控制小车的运动来使舵机能全方位搜索光源。

3.将多功能板与舵机固定在一起。
4.将舵机与小车固定在一起。
5.将Xbee传感器扩展板插在DFRduino Romeo 328控制板上。

6.将DFRduino Romeo 328控制板固定到车上,然后将传感器和舵机的接口导线插到控制板的IO口上。
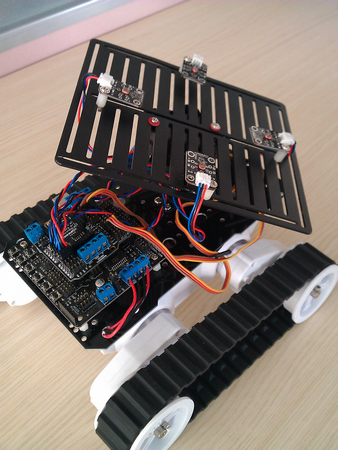
注:光传感器读取的是模拟信号,所以要将它们连接到扩展板的Analog口,0~5口可任意选择。而舵机是数字输出,要连接到PWM输出端,板子上有注明。写代码的时候要注意。
7.最后只要将一块太阳能电池板固定在多功能板上就可以了,这样一个小型的向日葵式的太阳能收集装置就做好了。